Features
Super High Data Fusion Frequency
High precision IMU
Designed for flexibility
Proprietary Magnetic Distortion
Multi-Gyroscopes

Cumulative error
Saber™ C4 uses adaptive Kalman filter to reduce sensor dift errors (i.e. nonlinearity such as offset drift, zero drift, random drift, etc.) to achieve very accurate angular velocity and heading angle data.

Multi-Gyroscopes
The Saber™ C4 unique Multi-gyroscope technology, through the latest Boson™ engine, creates more accurate, more stable output .
Development

For fast and easy application development:
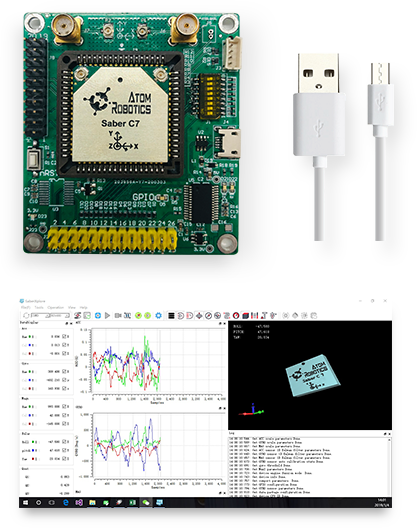
Evaluation Board Kit (EVK)
Plug and Play kit with:
» Simple USB connection for data and power
» I2C, SPI and UART data connections
» Interface to Raspberry PI and other IoT platforms
Software SDK
Windows-based software allows:
» Real-time data visualization
» Simple configuration profiles
» Data analysis with time line
» Export data to various formats
» C library, code source examples are included
Contact Us
 Email
Email
Get More Documents Email
Add: Zhongguancun Internet Cultural &
Creative Industrial Park Building 4
Balizhuang Haidian District,
Beijing.
Tel:(86-010)53682308
E-mail:contact@atom-robotics.com
We are committed to providing world-wide 7*24 hours service
and support.
