产品特征
各类运动数据输出
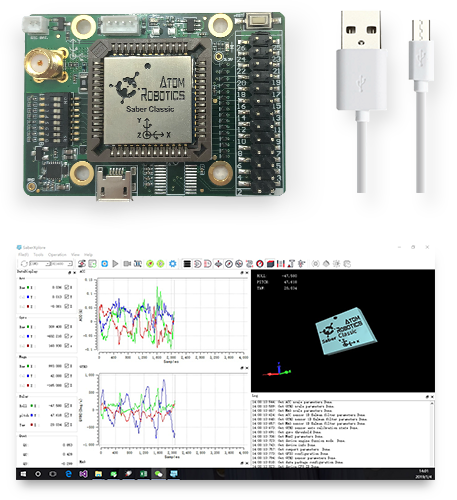
引擎可提供加速度、速度、位移等各种运动数据
支持空间定位应用
高精度IMU
垂直升沉精度 5cm融合解算,确保SOM输出精度
满足各类应用场景与需求
独有的抗磁算法
可在线实时进行抗磁干扰检测与补偿
在各种运动状态下保证姿态的准确
陀螺阵列
运用陀螺阵列,集成最新Boson™引擎,
输出精度更高,运行更稳定,产品更安全



 邮件
邮件