
应用场景
Saber C6相比传统组合导航定位系统,除了能够输出高精度的组合导航位置,它还是一个高精度INS,能够输出欧拉角、高度、绝对方向等融合后数据,使其在各个领域发挥最大作用。
Saber C6是一款能在复杂恶劣的环境下提供精确定位、姿态、高度等信息的微型GNSS/INS组合导航模组。
出厂前经过了严格的标定校准,并通过先进的融合算法提供精准的地位及姿态等信息。
应用场景
Saber C6相比传统组合导航定位系统,除了能够输出高精度的组合导航位置,它还是一个高精度INS,能够输出欧拉角、高度、绝对方向等融合后数据,使其在各个领域发挥最大作用。

无人巡检领域
能够提供融合后的高精度定位与绝对方向,帮助无人巡检机器人快速到达故障现场。
无人驾驶领域
多传感器融合以及高精度定位输出,帮助客户实现L1到L3级别的无人驾驶。

无人配送领域
Saber C6 提供高精度位置以及绝对方向数据输出,帮助无人机/无人车配送的最后一公里使命必达。

无人植保领域
精准定位加高速率实时姿态数据输出,助力植保无人机高效、稳定工作,无惧恶劣天气。
集成Boson™引擎进行超高的数据融合解算,
确保产品输出精度,满足各种应用场景与需求。
针对GNSS信号易受遮挡的特点,
引入INS,信息提高了导航定位的可靠性和连续性。
Saber™采用板载高灵敏度72通道GNSS接收器,
提供接口,用于连接外部GNSS天线。
Saber C6惯性导航模块支持里程计外部输入
数据的内部融合,能够帮助车辆在没有GNSS
信号的情况下精准定位。
内置气压传感器与多传感器的数据的融合,
使得高度信息精度大幅提升,达到亚米级精度。
独家双陀螺技术,集成最新Boson™引擎,
输出精度更高,运行更稳定,产品更安全。
严格的出厂标定,保证产品精度。
开发参数


开发环境
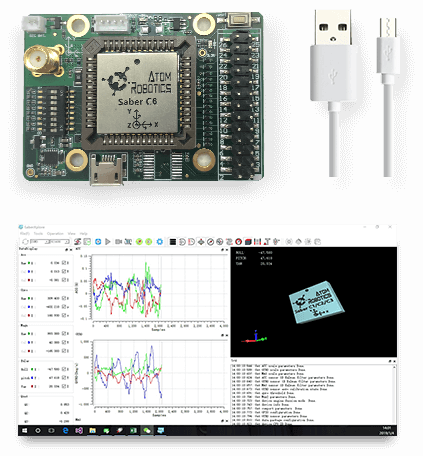
为了搭建快捷简便的开发环境:
开发板套件(EVK)
即插即用套件:
»支持模组与电脑端的USB连接
»支持I2C,SPI和UART三种接口
»支持与Raspberry PI和其他系统平台的连接
»状态指示LED,直观观察模组工作状态
软件开发包(SDK)
实现多系统平台支持:
»上位机软件SaberXplore让实时数据更直观
»配置简单方便
»使用时间轴进行数据分析
»支持各种格式的数据导出
»包含库文件、示例源代码等开发所需的全部文件
联系我们
 邮件
邮件
联系我们获取更多资源 邮件
地址: 北京市海淀区五路居中关村互联网
文化创意产业园4号楼
电话:(86-010)53682308
邮箱:contact@atom-robotics.com
我们承诺为客户提供7x24小时的技术与服务支持
